
אא
DC Motors
א א א א א א
K
א
אאא
٠٦
٪
אאא
K
אאאא
א
אאאאא
K
אא
אאאאאאאאא
א،אא
א
K
אא
אאאא
K
אאאאאא
K
אאאאאא
אאא
K
אאאא
א
K
٣
J
١
אא
،אאאאאא
אאא
F
אא
KE
אאא
א
F
א
E
אא،א
אאאאא
K
א،אאאא
א
K
٣
J
١
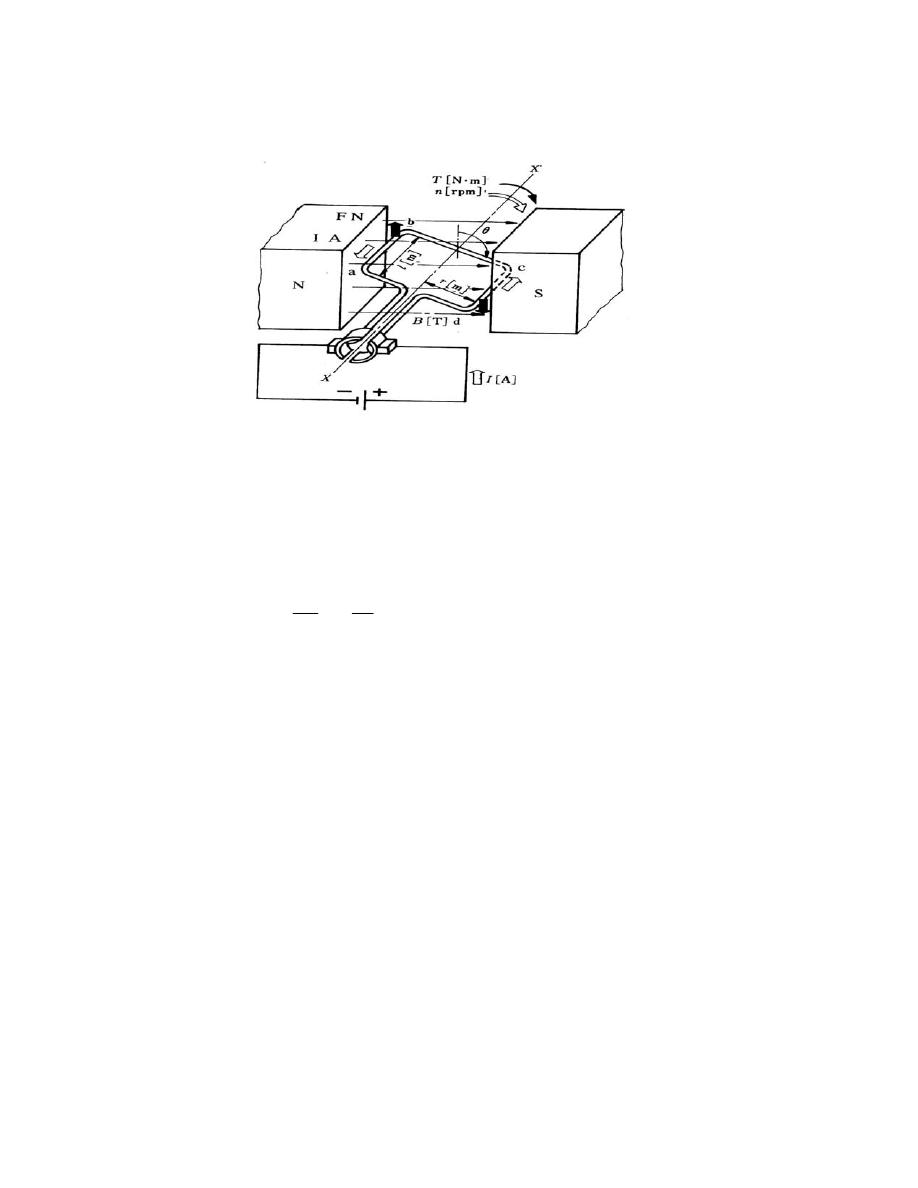
א
XX’
B
I
،אאאא
F
אא
א
cd, ab
אאא
K
א
א
L
אא
W
F=BIL
١ ٣
אאא
cd, ab
א،א
T
אאאא
K
٣
J
١
אא
٣
J
٢
אאאאא
Back e.m.f (E
b
)
אאאא
אאא
א
(Back e.m.f)
א
אאא
:
٢ ٣
60
2
2
n
Z
a
P
E
a
b
φ
=
אאאא
٣
J
٢
،
אא
א
א ،
אאא א ،א
K
٣
J
٢
אאאאא
א
F
٣
J
٢
KE
אא
אא
א
K
אא
אא
א،א
אאא
א
אא
K
אא
K
א
W
אאאא
Z
א
H
אא
٣ ٣
a
a
L
a
R
I
V
E
+
=
א
W
אאאא
F
א
ZE
א
J
אא
٤ ٣
a
a
L
a
R
I
V
E
−
=
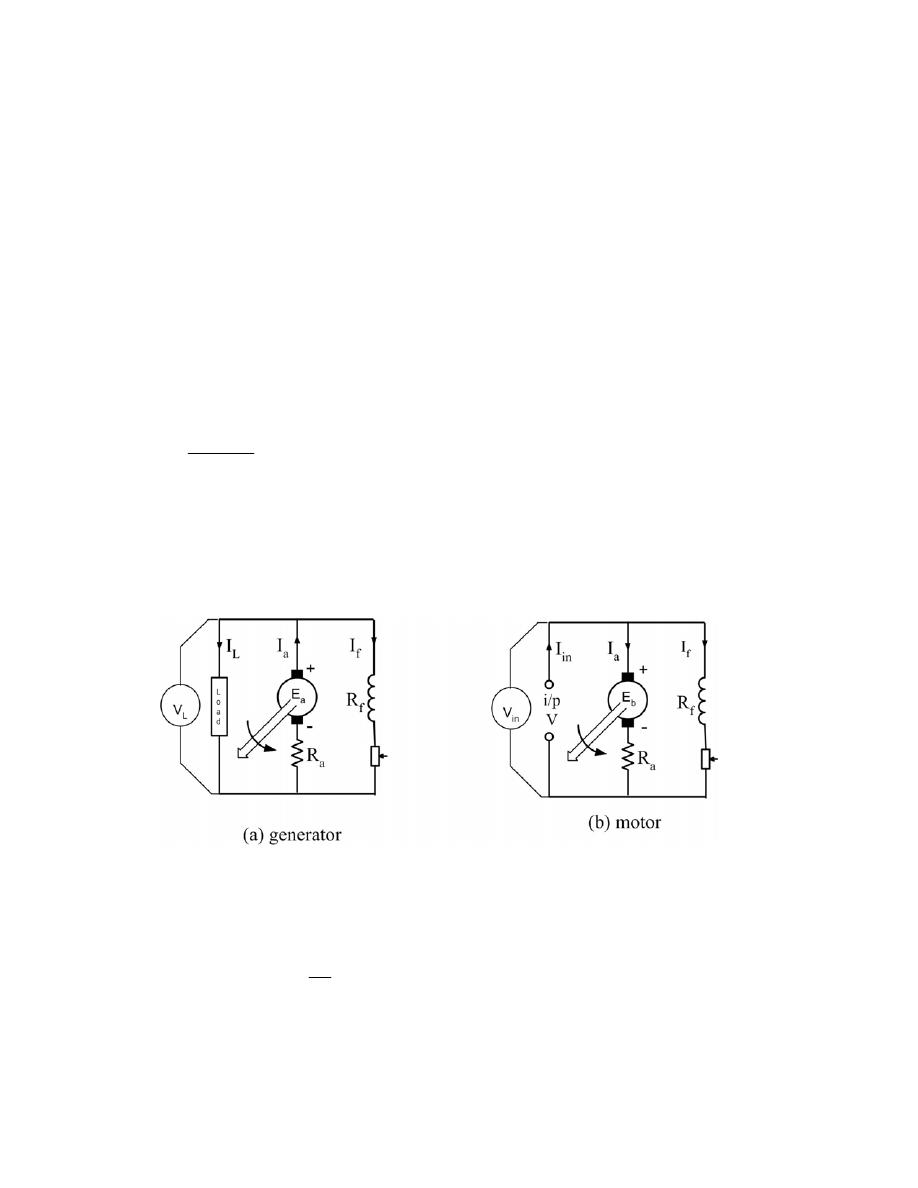
אאא
א
אא
א
F
٣
J
٣
E
،
F
٣
J
٤
KE
אאאאאא
א،אאאאאא
א
א
،אאאאאאא
א
אאאאא
א
K
אאאאאאא
F
א
E
،
אא
٣
J
٤
W
٥ ٣
a
b
L
a
R
E
V
I
−
=
אאאאאאאא
٣
J
٢
א،
א
א
n
Eb
אא
K
א
אאאאאאאאאא
Eb
٣
J
٢
אא
אאא
אאא
starting)
(current
א
٣
J
٥
Eb=
٠
W
٦ ٣
a
L
st
a
R
V
I
=
)
(
א
VL
F
E
Ra
F
א
E
אאא،אא
،א
א
K
א
אאא،אאא
א
א
Rst
א
٣
J
٣
אא
W
٧ ٣
st
a
L
st
a
R
R
V
I
+
=
)
(
א א א א אא
K
אאאאאאאאאא
K
אא
אאאא
אאא
א
K
٣
J
٣
א
٣
J
٣
אאא
Developed Torque
٣
J
٤
א
L
ra
n
B
K
א
Ic
א
F
אאא
W
٨ ٣
c
BLI
F
=
אא
F
א
E
אא
W

٩ ٣
c
I
L
a
r
B
a
r
c
BLI
a
Fr
c
T
π
π
2
2
=
=
=
٣
J
٤
א
א
אאאא
א
٢πraL
אא
אא
W
٠١ ٣
)
2
(
L
a
r
B
π
=
Φ
B
א
٣
J
٩
אאא
W
٣-١١
π
2
c
I
c
T
Φ
=
אאא
٢p
אאא
Ia
אא
Za
אאא
٢a
אאאא
W
٢١ ٣
p
a
Z
c
I
p
a
Z
c
T
T
2
2
2
π
Φ
=
=
אאא
Ic
אא
אאא
W
٣١ ٣
a
a
I
c
I
2
=
א
٣
J
٣١
א
٣
J
٢١
אא
אאא
א
W
٤١ ٣
a
I
a
Z
a
p
T
π
2
2
2
Φ
=
אא
W
٥١ ٣
a
I
K
T
Φ
=
K
א
=
π
2
2
2
a
Z
a
p
א
٣
J
٥١
אאא
א
Ф
،
Ia
K
אא
٣
J
٢
אאא
Eb
W

٦١ ٣
60
2 n
a
I
b
E
T
π
=
אאאא
W
٧١ ٣
ω
P
T
=
P
א
=
EbIa
F
א
x
א
E
ω
אאא
אא
W
٨١ ٣
60
2 n
π
ω
=
א
٣
J
٦١
אא
אא
K
ﺷﻜﻞ
٣
-
٤
٣
J
٤
א
א
Types of DC motors
א א
א
F
אא
WE
J
אאאאא
F
א
E
J
אאא
אאא
א،אאאאאאא
אאאאאאאאאא
K
٣
J
٤
J
١
אא
DC shunt motor
٣
J
٥
אא
א
F
א
E
Rsh
א א א אא
K
א
Ra
אא
Rst
K
אאאא
K
٣
J
٥
אא
אאאא
٣
J
٥
W
٩١ ٣
sh
a
in
a
a
in
b
I
I
I
R
I
V
E
+
=
−
=
אאאא
W
٠٢ ٣
φ
n
K
E
b
b
=
א
٣
J
٩١
א
٣
J
٠٢
א
W
١٢ ٣
Φ
−
=
Φ
=
b
a
a
in
b
b
K
R
I
V
K
E
n
•
אא
אאאאא
א
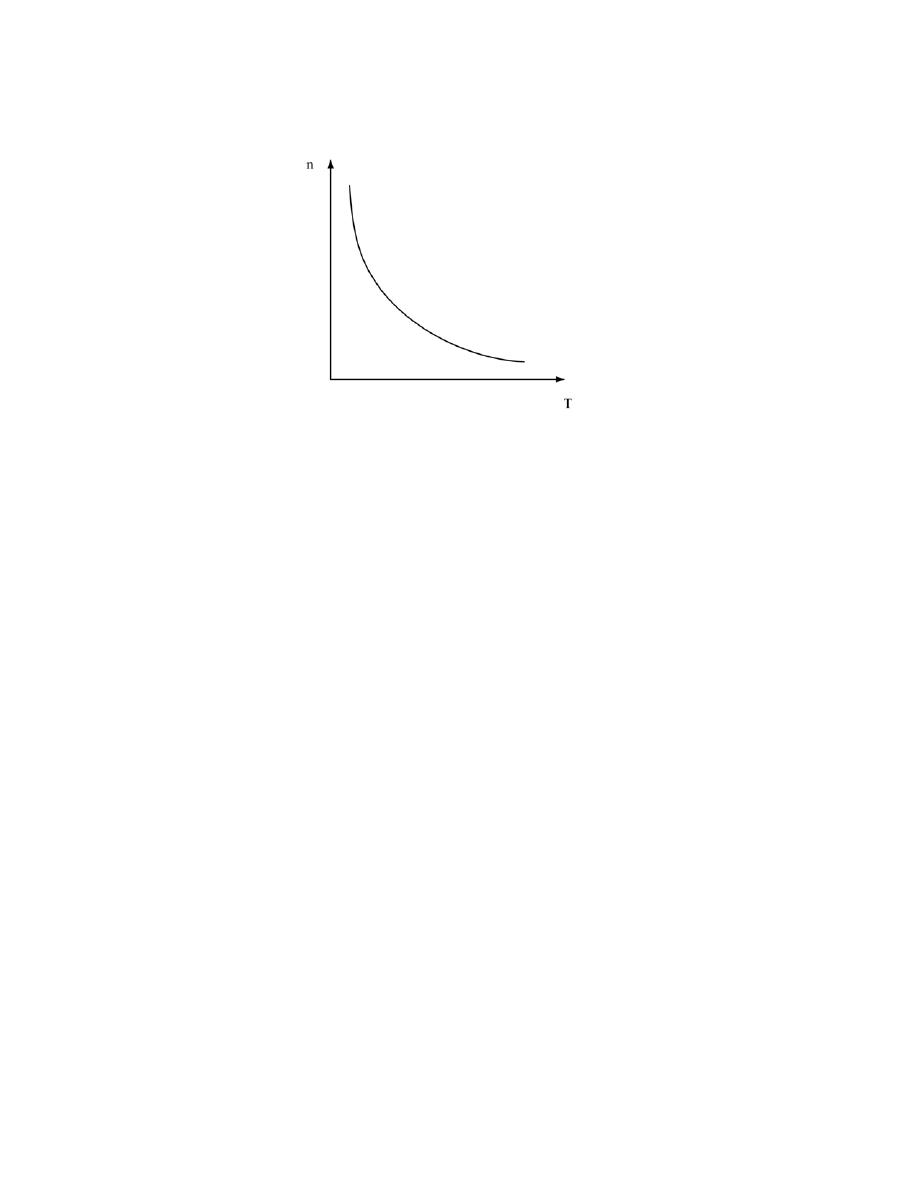
W
J
אא
n=f(Ia)
J
אא
T=f(Ia)
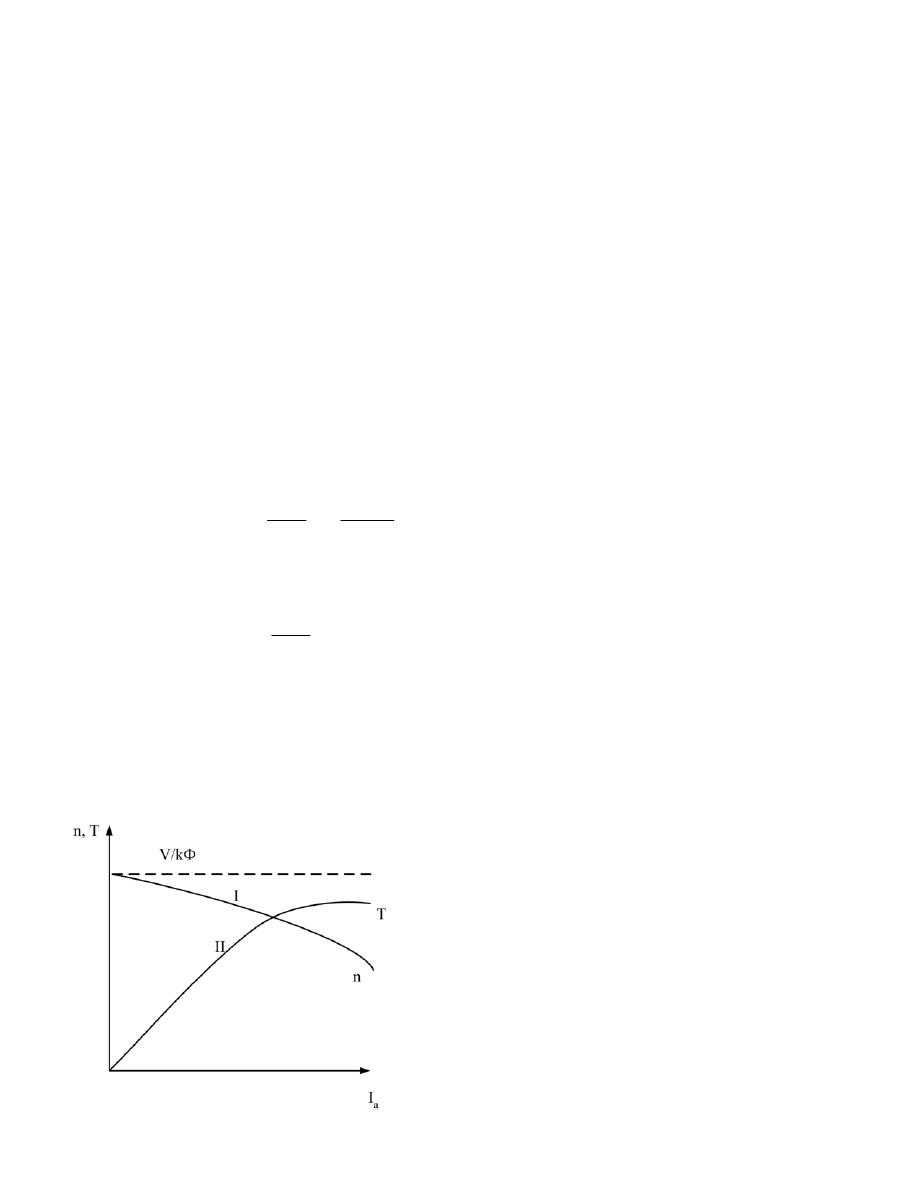
J
אא
n=f(T)
א
٣
J
١٢
אאא
F
א
E
אא
א
אא
٣
J
٦
I
K
אא
אאא
٣
J
٥١
אאא،
א
F
א
E
،אאא
אא
א
א
٣
J
٦
II
K
אא
٣
J
٥١
א
٣
J
١٢
א
א
W
٢٢ ٣
2
2
Φ
−
Φ
=
b
a
b
in
K
R
T
K
V
n
א
٣
J
٢٢
אאאאא
K
אאא
K
א
(T=
)٠
א
Φ
=
b
in
K
V
n
א
(no load speed )
אא
٣
J
٢٢
אאא،
א
א
K
٣
J
٧
אאאא
K
א
K
אאא٦J ٣
٣
J
٧
אאאאא
•
א
אאא
:
אאא
א
א
،אא،אאא
אאא
אא
אא،א
K
א
אאאא
K
٣
J
١
א
٠٤٢
٠٥٧
L
א
٠٣
،
אא
٥٠
{٠
אא
K
K
א
Vin=
٠٤٢V n=٧٥٠ rpm Ia=٣٠ A Ra=٠{٠٥Ω

Eb=Vin-IaRa
=
٠٣ ٠٤٢*٠{٠٥=٢٣٨{٥ volt
T=EbIa/ω ω=
٢πn/٦٠ rad/sec
T=
٨٣٢{٥*٣٠/(٢*π*٧٥٠L٦٠)=٩١{١ N.m
٣
J
٢
א
٠٠٥
א،
٠٦٩
K
א
٢٥
א א
٣
K
אאא
٤٠
{٠
٠٠٢
א
K
א
אא
K
א
٢p=٤ Vin=٥٠٠ V Za=٩٦٠ Iin=٥٢ A Φ=٣megalines Ra=٠{٠٤ Ω
Rsh=
٠٠٢Ω
Ish=Vin/Rsh=
٠٠٥L٢٠٠=٢{٥ A Ia=Iin-Ish=٥٢ ٢{٥=٤٩{٥ A
Eb=Vin-IaRa
=
٠٠٥- ٤٩{٥*٠{٠٤=٤٩٨{٠٢ V
60
2
2
n
Z
a
P
E
a
b
φ
=
60
*
960
*
)
8
10
*
6
10
*
3
(
*
2
4
03
.
498
n
−
=
n=
٢١٥{٧٧ rpm
ω=
٢πn/٦٠ ω=٢π*٥١٢{٧٧L٦٠=٥٤{٣٣ rad/sec
T=EbIa/ω T=
٨٩٤{٠٣*٤٩{٥L٥٤{٣٣=٤٥٣{٧٥ N.m
٣
J
٤
J
٢
א
DC series motor
٣
J
٨
אא،אא
א
אא،א
W
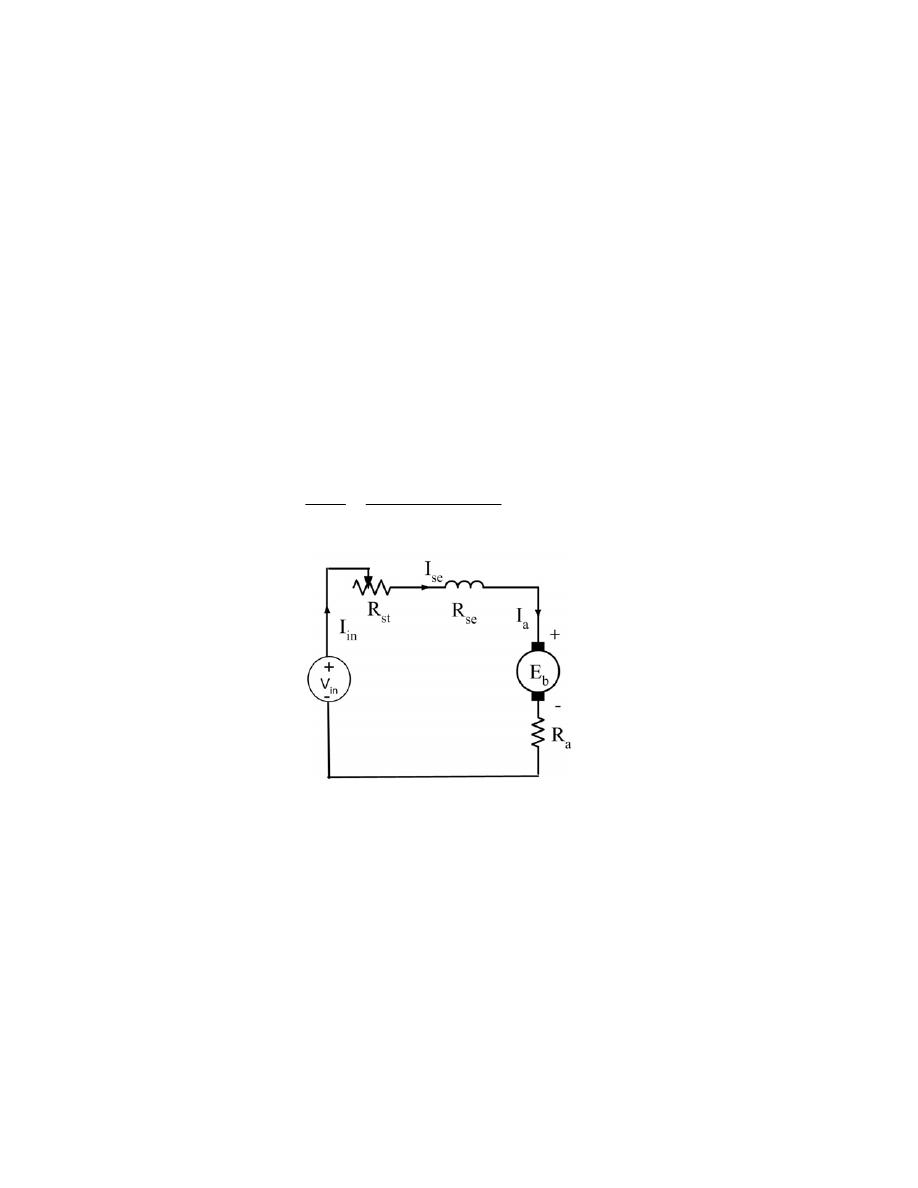
Eb=Vin-Ia(Ra+Rse)
٣٢ ٣
Ia=Iin=Ise
٤٢ ٣
א
א
א
Φ
א
Ise
א،
:Ia
Φ=CIse=CIa
٥٢ ٣
א
٣
J
٥١
אאאא
W
T=K´Ia
٦٢ ٣ ٢
אאא،אא
K
٣{٢٧
a
b
b
b
nI
K
n
K
E
′
=
Φ
=
א
٣
J
٦٢
א
٣
J
٣٢
א
W
٨٢ ٣
a
b
se
a
a
in
a
b
b
I
K
R
R
I
V
I
K
E
n
′
+
−
=
′
=
)
(
٣
J
٨
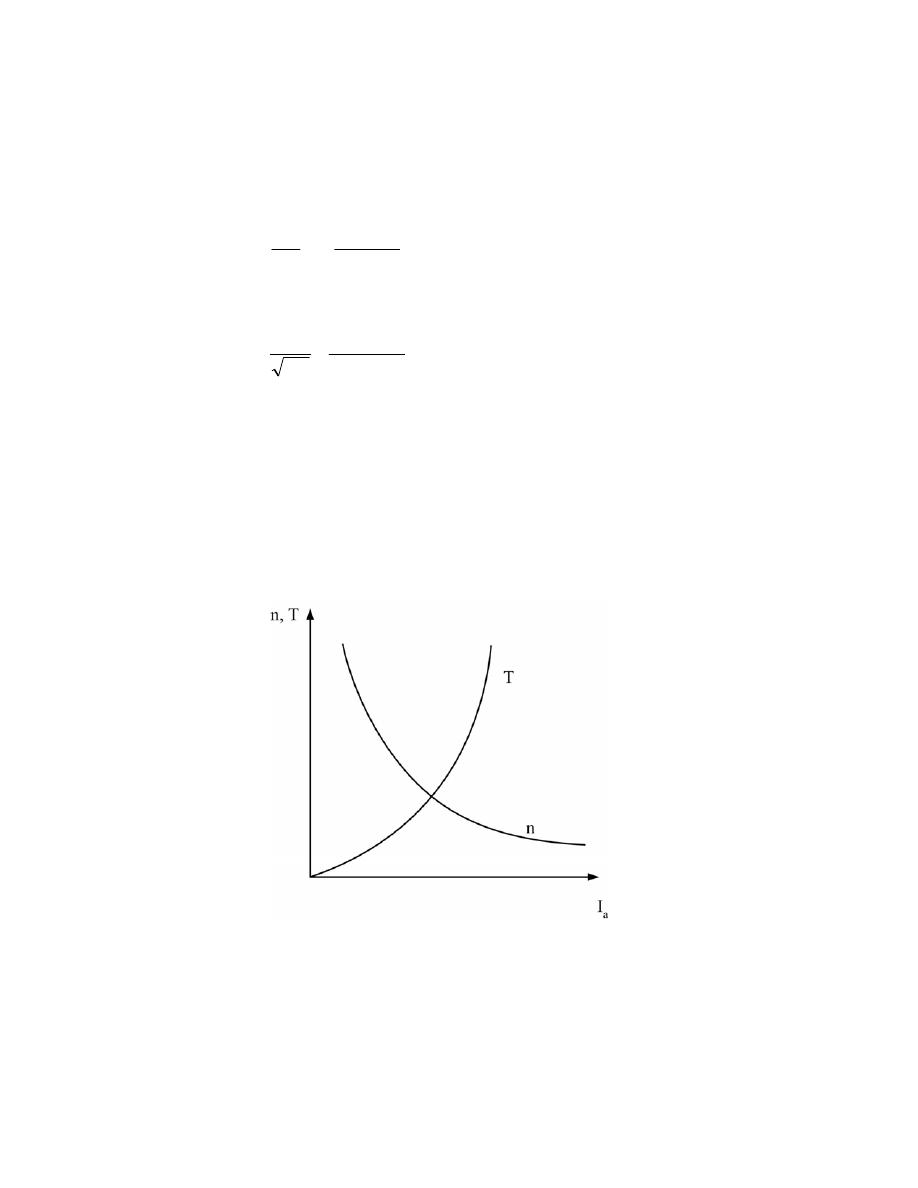
אא
•
אא
א
٣
J
٦٢
،אא
אא
א
(parabola)
٣
J
٩
K
א
٣
J
٨٢
،אאאאא
א
F
א
E
א
א
(hyperabola)
אאא
٣
J
٩K
אא
٣
J
٥٢
א
٣
J
٨٢
א
א
W
٩٢ ٣
2
2
a
se
a
a
in
I
R
R
T
I
V
n
α
α
+
−
=
א
٣
J
٦٢
א
٣
J
٩٢
אא
W
٠٣ ٣
α
α
se
R
a
R
T
in
V
n
+
−
=
א
٣
J
٠٣
אאאאא
٣
J
٠١
K
אא
אאאא
א
(T=
)٠
אאאא
א
K
٣
J
٩
אאאאאא
٣
J
٠١
אאאאא
•
אא
אא
א
אאא
F
א
E
אא
F
א
E
אא
א
K
אאא
אא
אאאאא،אאאא
אאאא
K
אאאא
،א
אאאאאאא
אאא
אאאאאא
א
K
אאאאאאא
K
٣
J
٣
אא
٠٢٢
א
٠٥
א
٠٠٠١
L
א،
٥١
,
א
١,
K
א
אא
٠٨
٪
אאא
٠٦
אא
א
אאאאאא
א
Vin=
٠٢٢V Ia١=٥٠A n١=١٠٠٠rpm Ra=٠{١٥ Ω Rse=٠{١Ω n٢=٠{٨n١
Ia
٢=٦٠A
Eb
١=Vin-Ia١ (Ra+Rse)
=
٠(٠٥ ٠٢٢{١٥H٠{١)=٢٠٧{٥ V
Eb
٢=Vin-Ia٢ (Ra+Rse)
=٠٢٢-٦٠(٠٫١٥+٠٫١)=٢٠٥ V

T
١
=E
b١
I
a١
/ω
١
=٥٫٧٠٢*٥٠/(٢π*١٠٠٠/٦٠)=٩٩٫٠٧ N.m
T
٢
=E
b٢
I
a٢
/ω
٢
=٥٠٢*٦٠/(٢π*٠٫٨*١٠٠٠/٦٠)=١٤٦٫٨٢ N.m
٣
J
٤
אא
٠٢٢
א
٢٥
א א
K
א
٠٣٦
אא
٨١٠
{٠
אאא،
٢,
١,
K
אאאאא
K
אאאאא
٠٦
٪
אאא،אא
K
א
٢p=٤ V
in
=٠٢٢V I
a
=٢٥A Z
a
= ٠٣٦Φ=٠٫٠١٨ wb R
a
=٢٫٠Ω R
se
=١٫٠Ω
T
٢
=٦٫٠T
١
E
b١
=V
in
-I
a١
(R
a
+R
se
)
=٠٢٢-٥٢(٠٫٢+٠٫١)=٢٠٤٫٤V
60
2
2
1
1
n
Z
a
p
E
a
b
φ
=
60
*
630
*
018
.
0
*
2
4
4
.
204
1
n
=
n
١
= ١٤٥rpm
T
١
=E
b١
I
a١
/ω
١
=٤٫٤٠٢*٥٢/(٢π*٥٤١/٦٠)=١٨٧٫٦١ N.m
TαI
a
٢
2
2
2
2
1
2
2
1
2
)
52
(
6
.
0
a
a
a
I
I
I
T
T
=
=
=
A
I
a
3
.
40
)
52
(
*
6
.
0
2
2
=
=
E
b٢
=V
in
-I
a٢
(R
a
+R
se
)
=٠٢٢-٤٠٫٣(٠٫٢+٠٫١)=٢٠٨ V
1
1
2
2
1
1
2
2
1
2
a
a
b
b
I
n
I
n
n
n
E
E
=
Φ
Φ
=
52
*
541
3
.
40
*
4
.
204
208
2
n
=
3
.
40
*
4
.
204
52
*
541
*
208
2
=
n
n
٢
= ٠١٧rpm
٣
J
٤
J
٣
אא
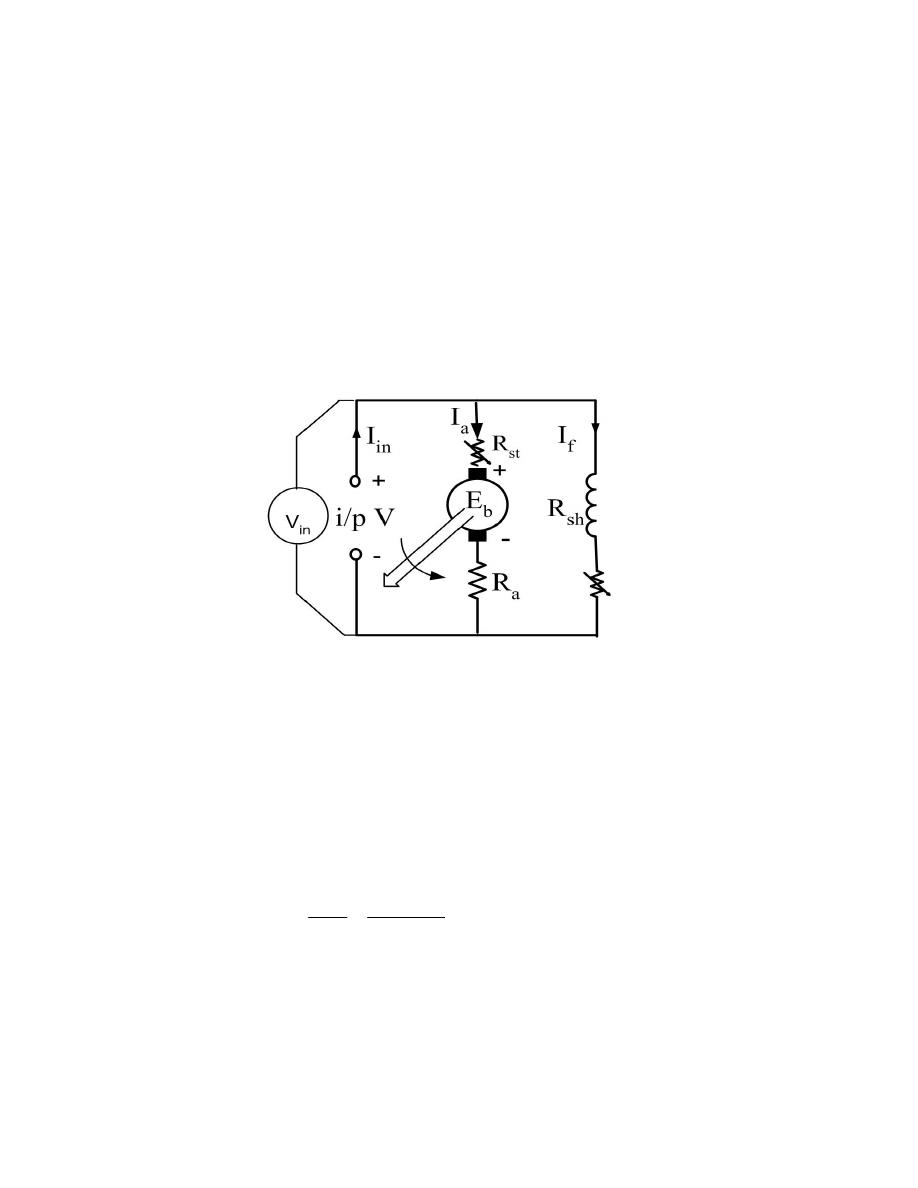
DC compound motor
אא
אאאא
א
אאאא،אאא
א ،אא א א א
א
K
،אא אא א א
،
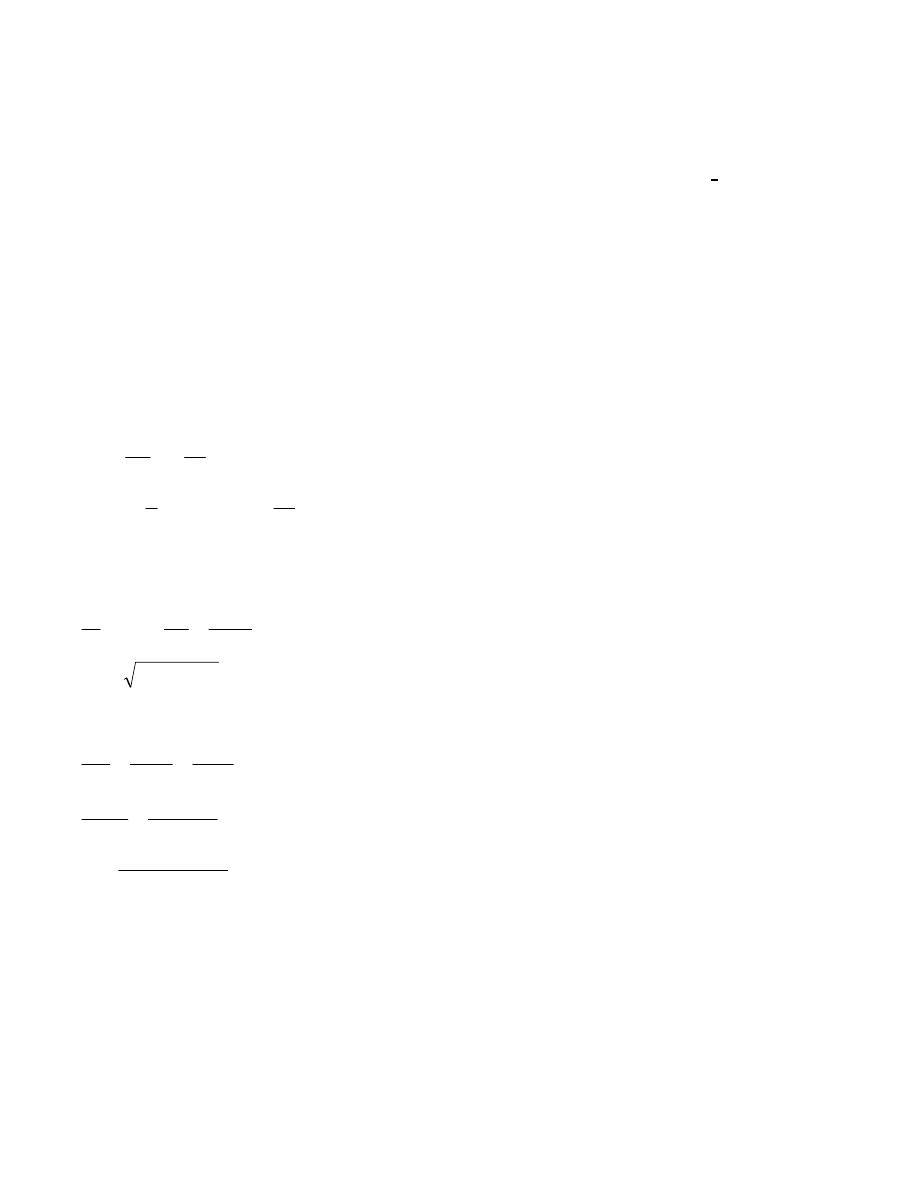
٣
J
١١
א
K
٣
J
١١
אא
J
J
אא
W
٣-٣١
se
in
a
a
in
b
R
I
R
I
V
E
−
−
=
٣-٣٢
se
in
in
sh
sh
sh
R
I
V
R
I
V
−
=
=
٣-٣٣
sh
a
se
in
I
I
I
I
+
=
=
٣-٣٤
Φ
−
−
=
K
R
I
R
I
V
n
se
in
a
a
in
אא
:
٣-٣٥
)
(
se
a
a
in
b
R
R
I
V
E
+
−
=
٣-٣٦
in
sh
sh
sh
V
R
I
V
=
=
٣-٣٧
sh
a
in
I
I
I
+
=
٣-٣٨
Φ
+
−
=
K
R
R
I
V
n
se
a
a
in
)
(
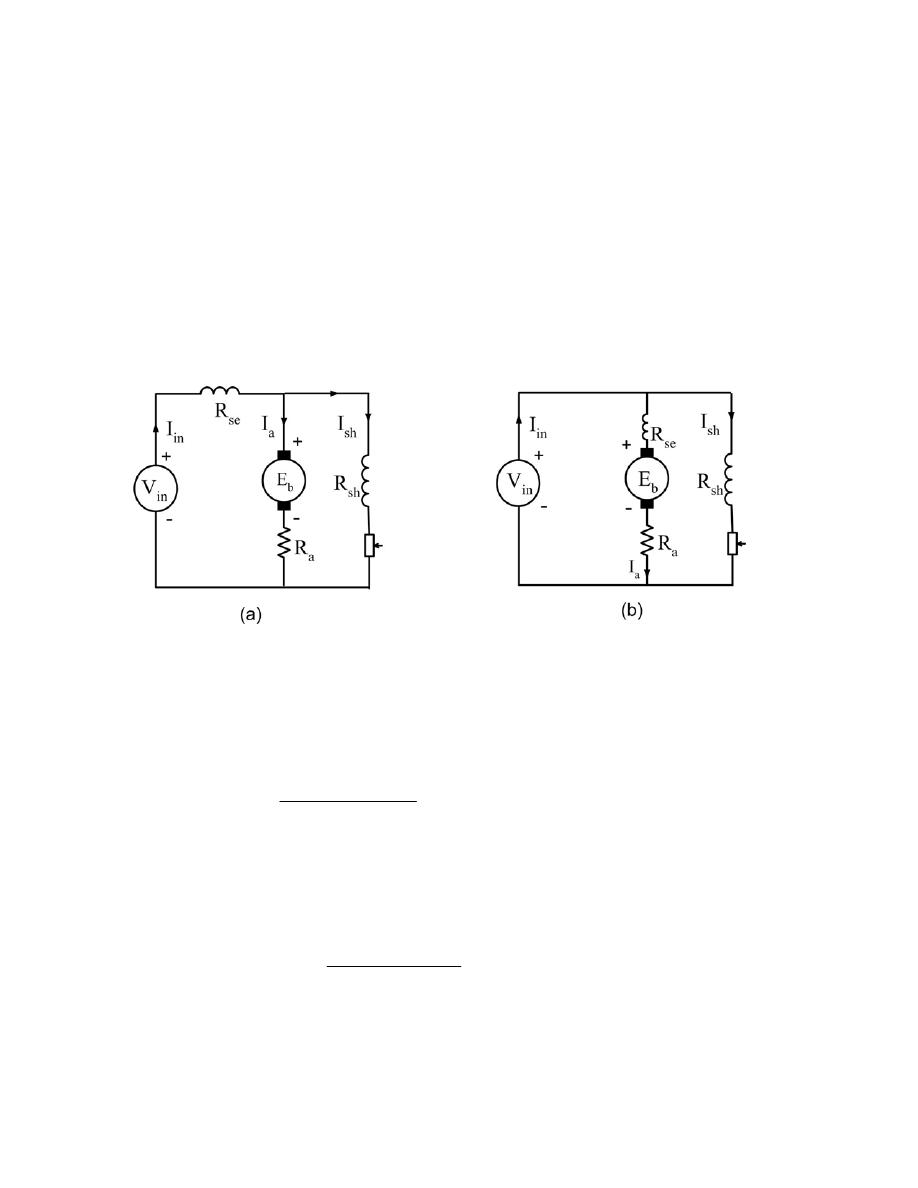
א אא אא
٣
J
٦١
א
Φ
א
אא אא א א
K
א א
אא
אא
F
אא
E
،
אא
K
אאא
א
W
J
א
:(Comulative compound motor)
א
Φ
אאאאאאא
א
،אא
٣
J
٢١
אאא
K
J
(Level compound motor
)
:
אאא
Φ
א،אא
אא
،
٣
J
٢١
K
J
(Differential compound motor)
W
אאאאאא
א
K
Φ
אאאא
א
א
٣
J
٢١
K
٣
J
٢١
אאא
•
אאאא
:
،אאאאאאא
א
א א
K
א א א
א
(Rolling mills )
אאאאא،
א
אא،א ،א
אאא
K
٣
J
٥
אא
Speed control and reversal
א،א א א
F
٣
J
١٢
،
٣
J
٩٢
،
٣
J
٤٣
E
،
אא
אאאא
א א א א
K
א אא
אאא،אא
K
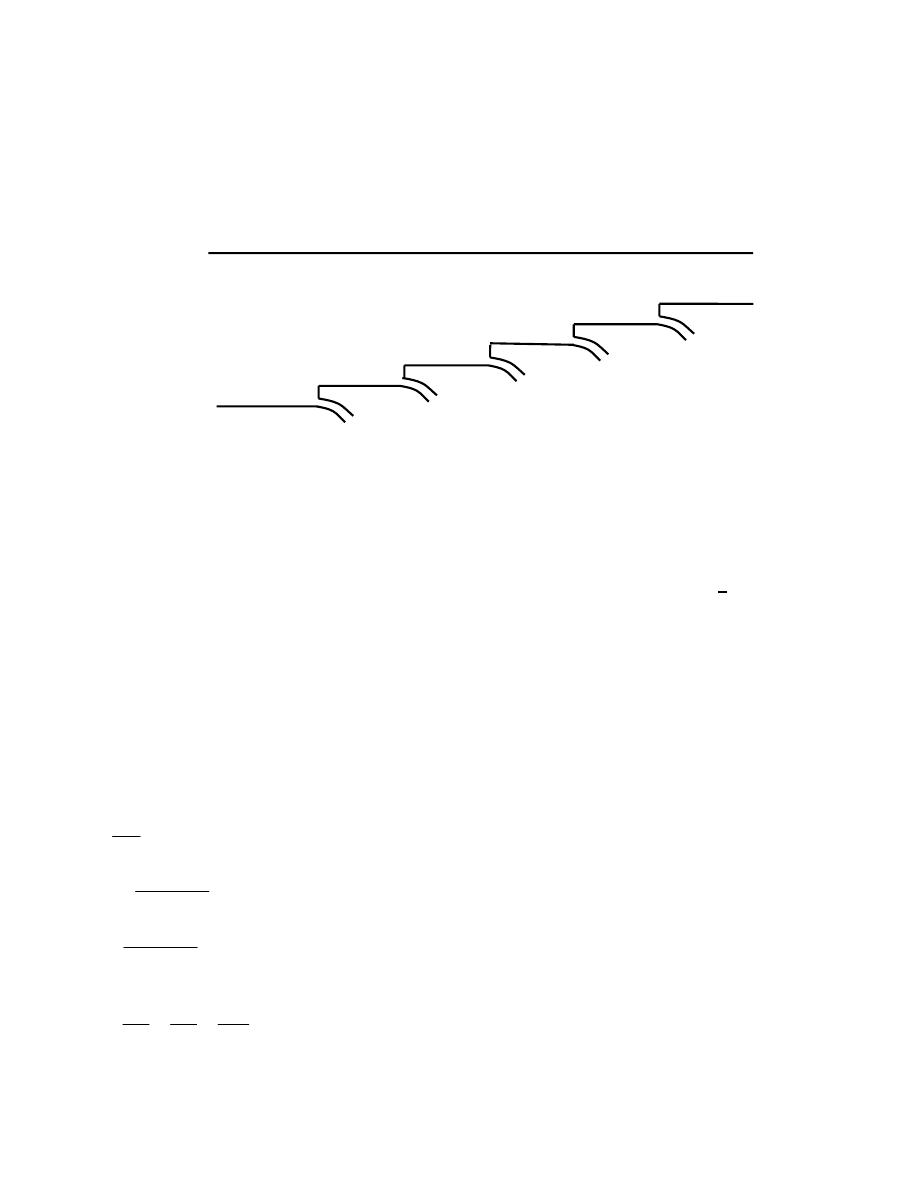
٣
J
٥
J
١
אאא
J
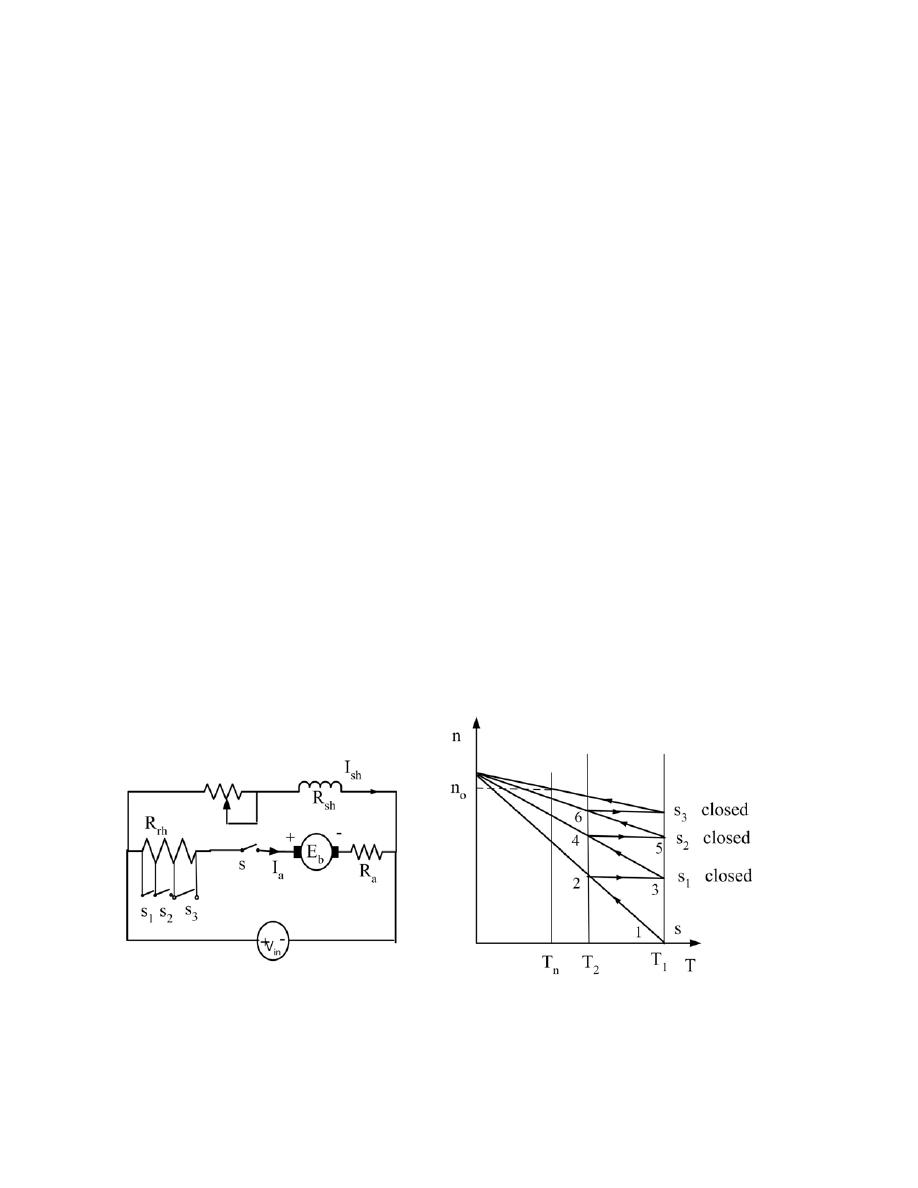
W
אא
אאאאא
،
٢
J
٣١
K
א
א
S
١, S٢, S٣
אאאאא
K
٣
J
٣١
א
،א
אא
K
٣
J
٣١
א
אא
S
א
S
١, S٢, S٣
K
אאאא
א
K
٣
J
٣١
א
אאא
J
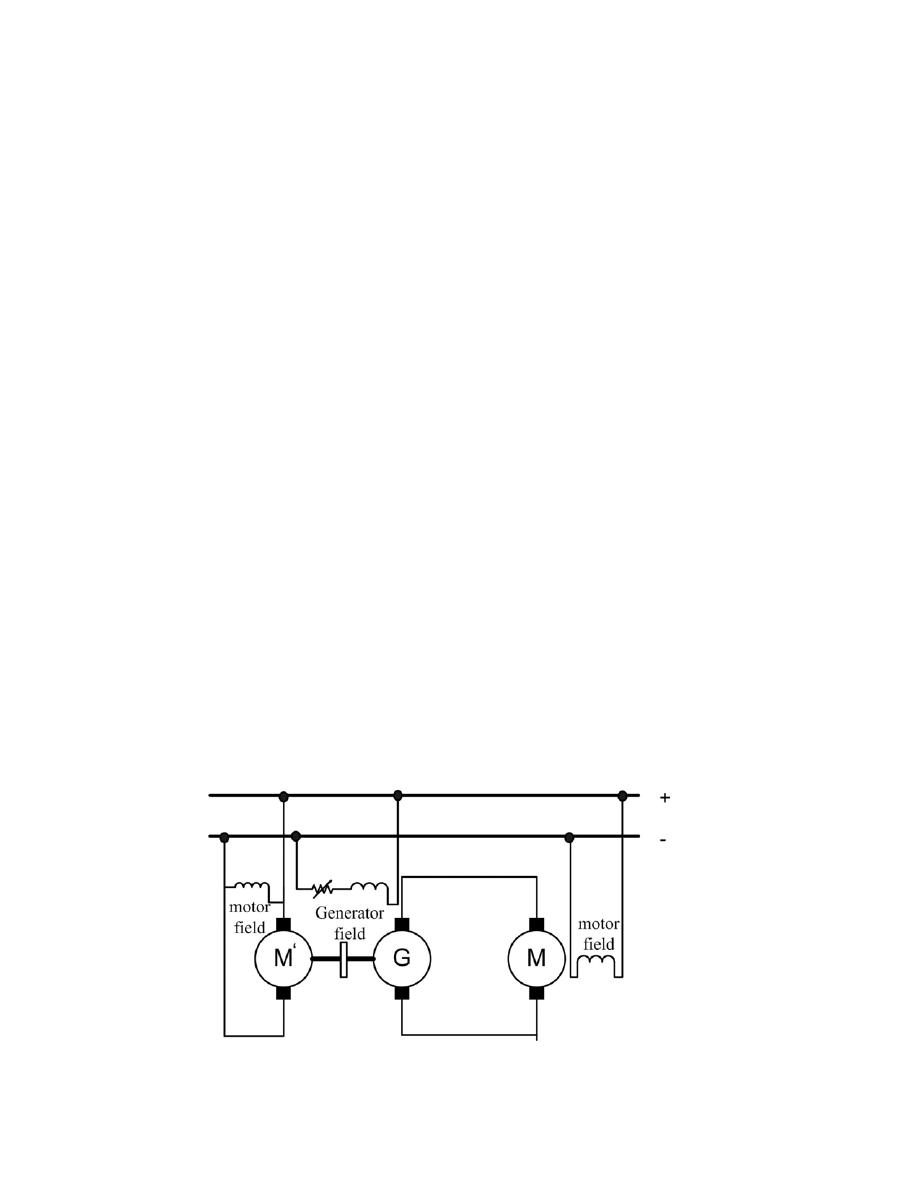
W
אאא
،אאאאא א
אאאא
?
?
٣
J
٤١
،
אאא
M
G
אאא،
M’
אאאא،
א
אא
אא
K
אא
א
א
K
אאאא
K
J
W
אא
(flux control
)
،אאאאא
א
אאאא،
א
אאאא
אאא
K
٣
J
٥
J
٢
אא
א
אאאא
W
W
אאא
W
א
٣
J
٩٢
אא אא
אאאאא،א
אאאא
אא
.
٣
J
٤١
אאא
?
?
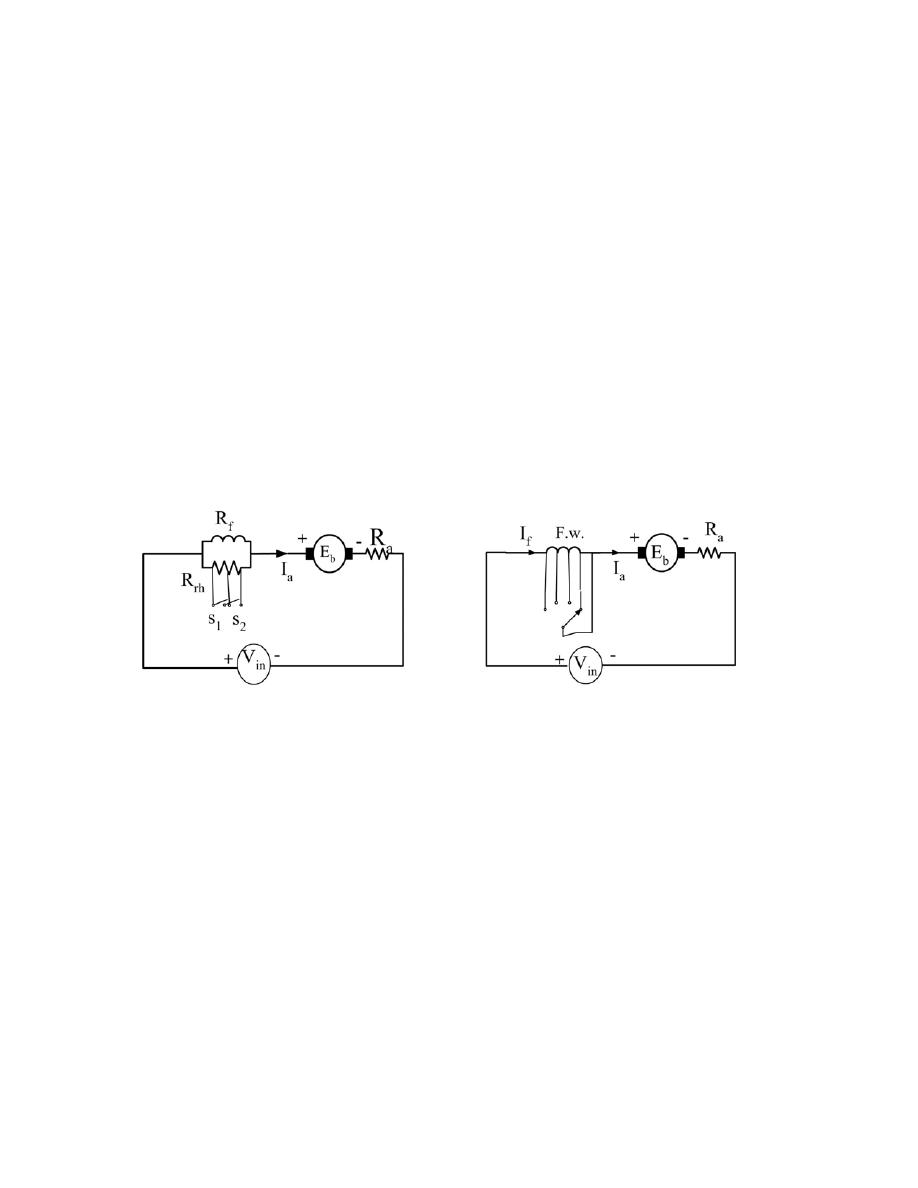
W
אאא
W
אאא
Φ
אאא
I-
in
א
K
א
I
in
א،אא
א
א،אאא
א،א
K
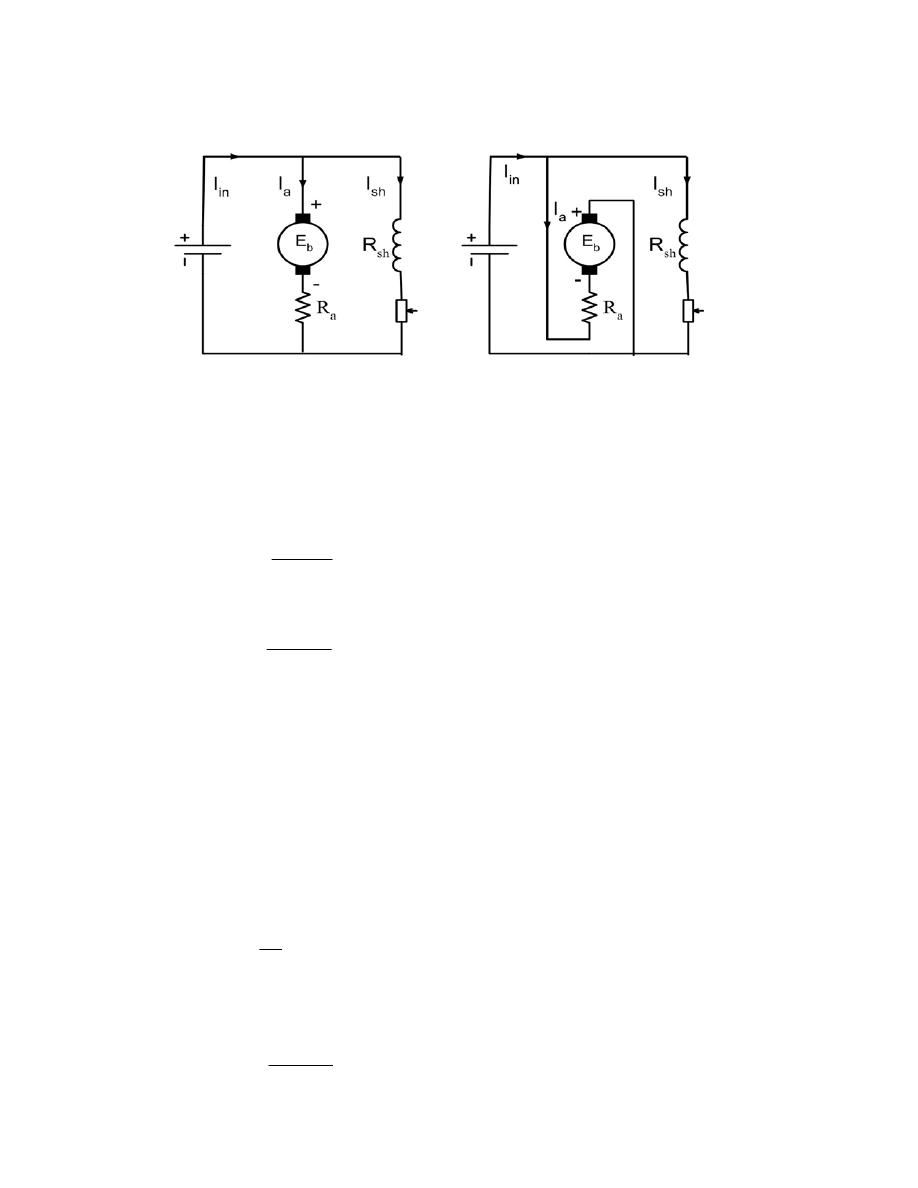
٣
J
٥١
אא
W
א
W
אא
אאא
،אאאאאא
א
٣
J
٥١
K
אאא
א
K
٣
J
٥١
אאא
٣
J
٥
J
٣
אאא
א
אא
אאאאא
K
אאאאא
א
K
א
א،אא
אא
אא
א
K
אאאאא
٣
J
٦١
א،אא
K
٣
J
٦١
אא
٣
J
٦
א
Starting Methods
אאאאאאאא
K
אאאאא
W
אא
W
٩٣ ٣
a
b
in
a
R
E
V
I
−
=
אא
W
٠٤ ٣
se
a
b
in
a
R
R
E
V
I
+
−
=
אאאאאאאא
אא
א
א
K
אא
א
אאא
F
א
KE
א
٣
J
٣
،
٣
J
٩٣
،
٣
J
٠٤
אאאא
אאאאאא
א
א
K
אאאאא
W
אא
W
١٤ ٣
a
in
starting
R
V
I
=
אא
W
٢٤ ٣
se
a
in
starting
R
R
V
I
+
=

٣
J
١٤
،
٣
J
٢٤
א،
א
٠٠٢
א
١,
F
١
E
אא
٠٠٠٢
אא
אא
K
אא
א
(starter)
אאאא
א
אא،אא
F
E
א
אא
א
אא
א
K
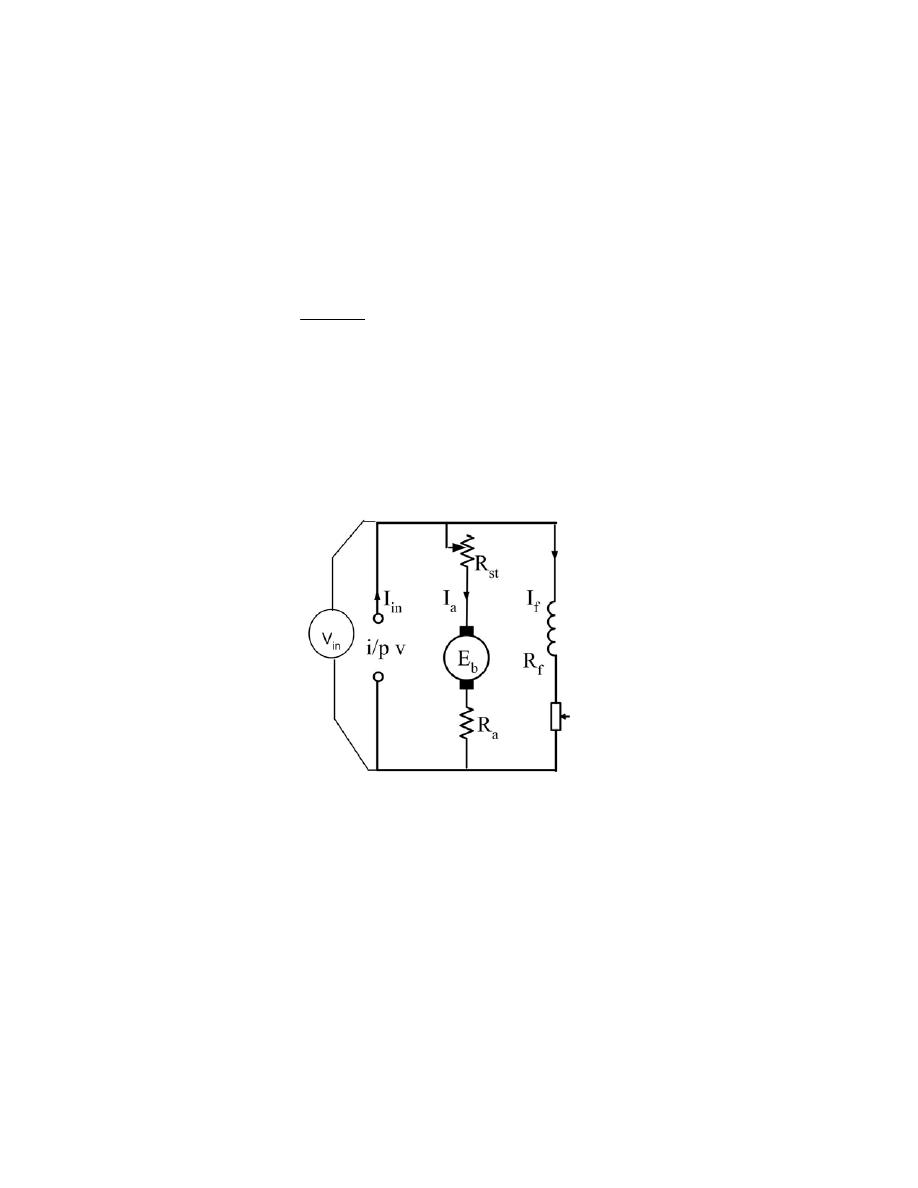
٣
J
٦
J
١
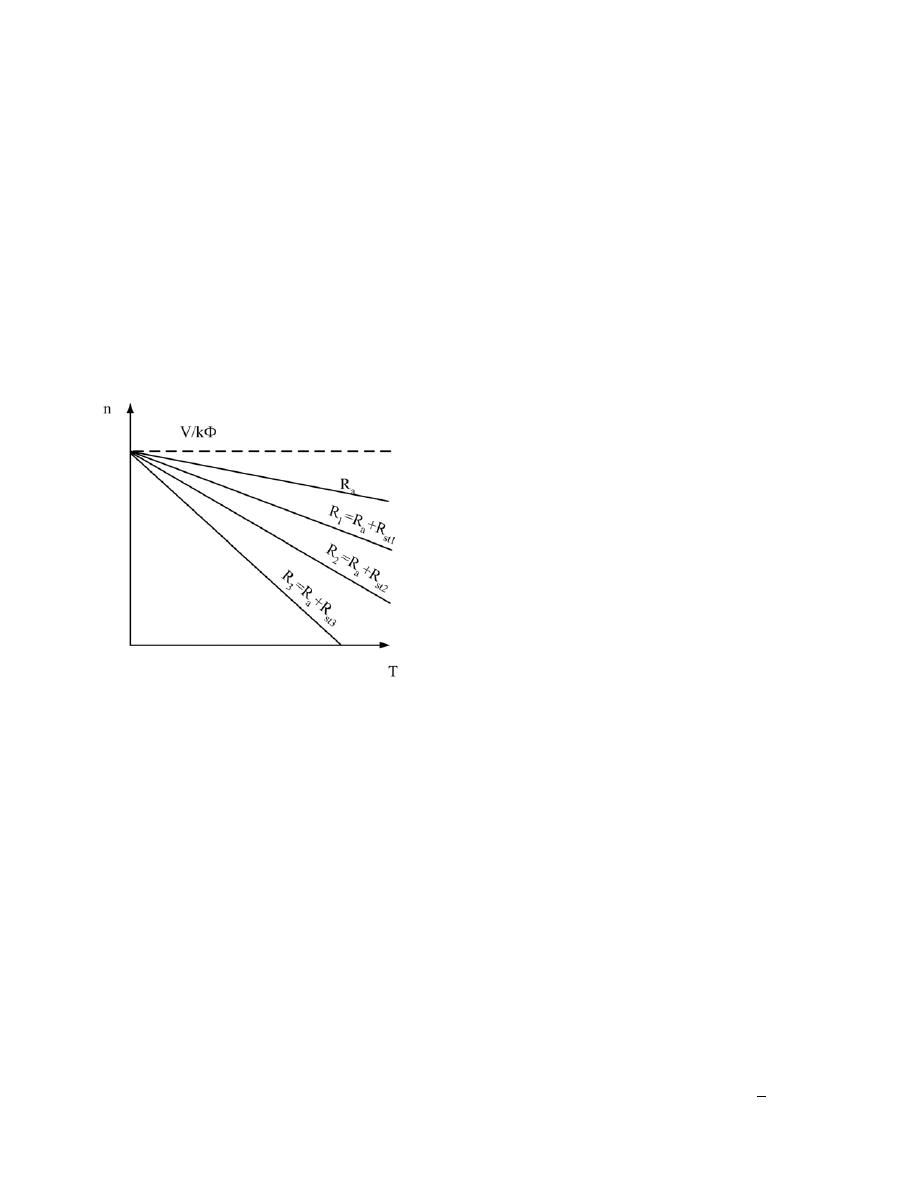
אא
אאא
אא
אאא،א
א
אא،אאא
K
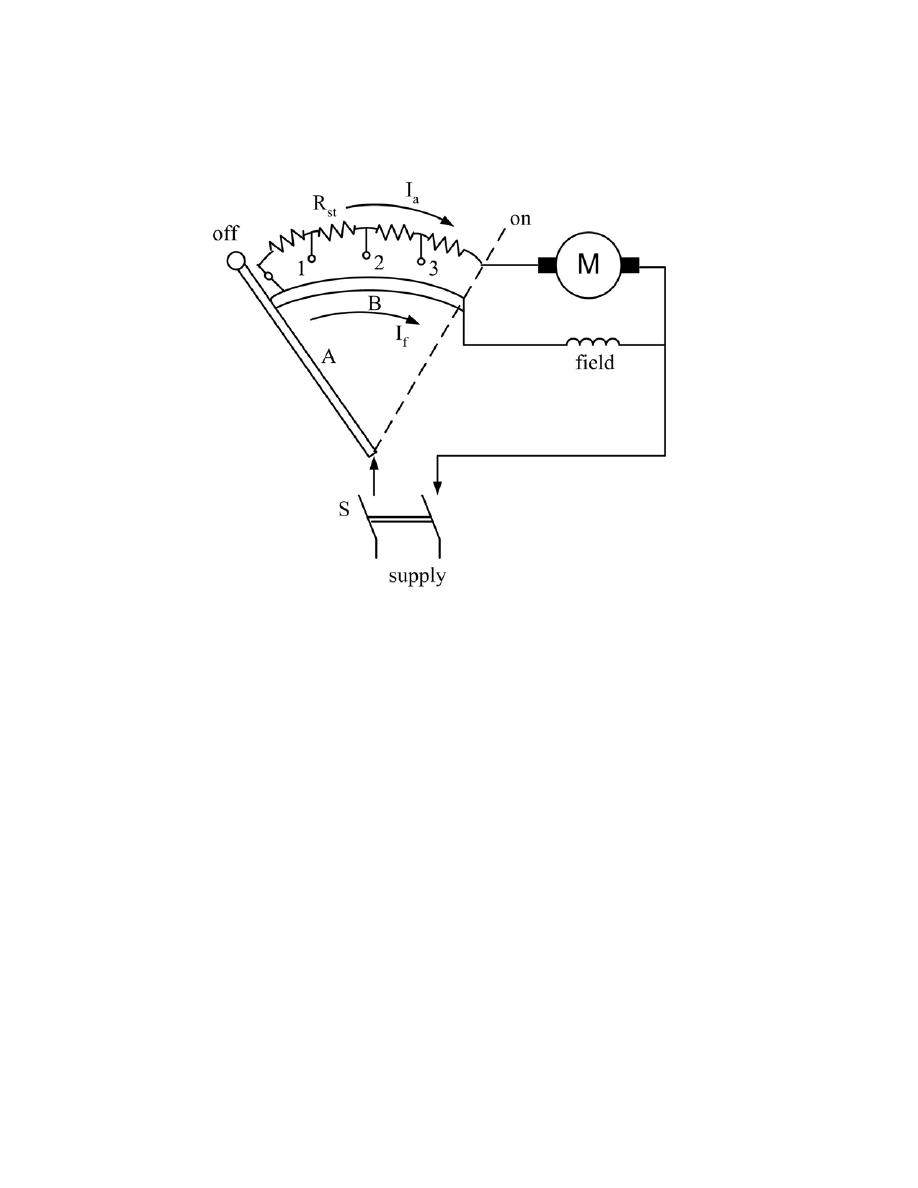
٣
J
٧١
אא،אאאא
(A)
אא
א
Rst
אאא
(B)
א
אאא
אאא
אא
،אא
אא
(A)
א
١
٢
٣
א
on
אאאאאאאא
אא
K
אאאאאא
(S)
אאאא
א
(on)
אאאאאא
א
(off)
K
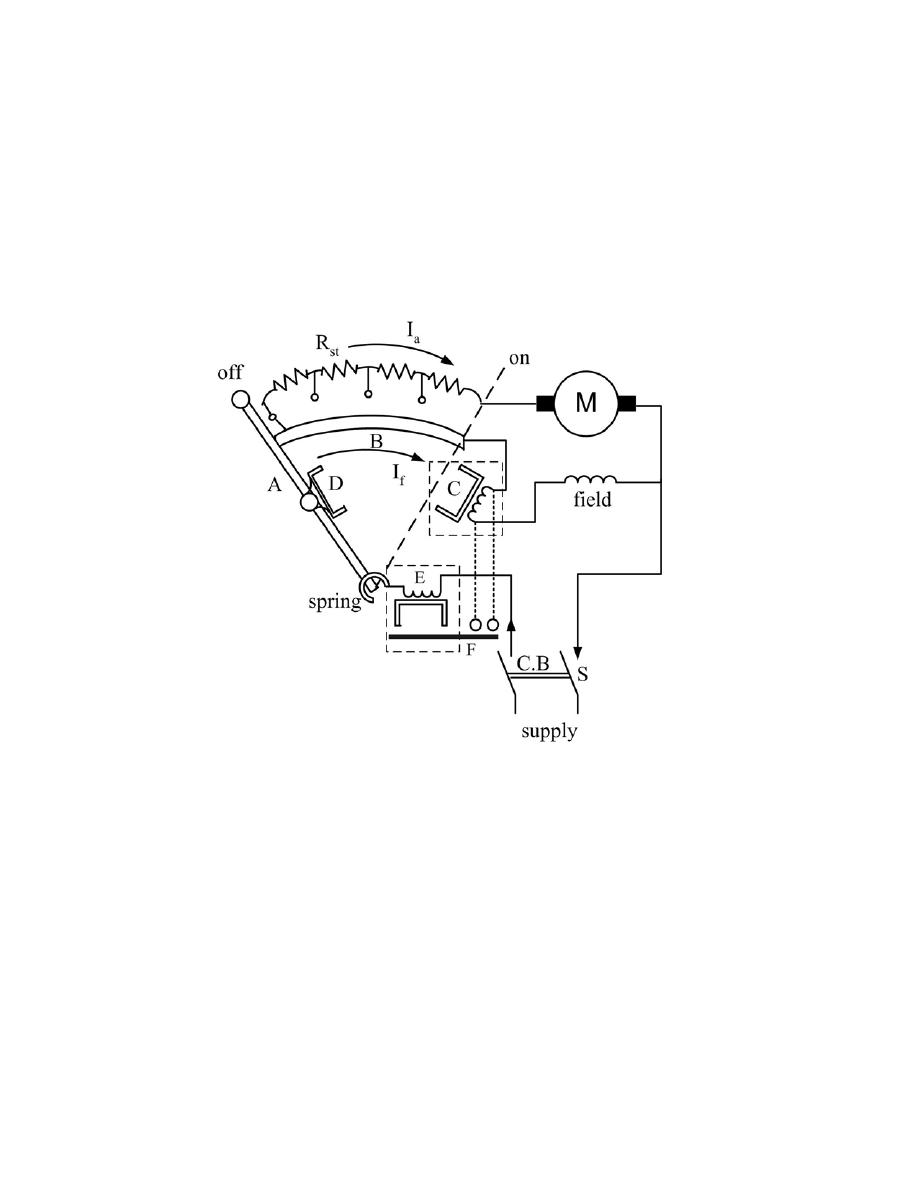
٣
J
٧١
٣
J
٦
J
٢
אא
אאאא
٠٢
F
E
א
(overload)
אאאא
(circuit breaker)
אא
(s)
אא
K
א
٣
J
٨١
אאא
K
אאאא
A
א
off
،
א
S
אאא
E
אא
A
אא
B
א
C
،אאא
א
א א
א א אא
K
א
C
א
D
א
C
אא
A
א
א
C
K
א
א
Rst
אא
A
א
on
אאאאא
K
אא
S
אאאאא
C
א
אא
D
אא
A
א
on
א
off
א
(spring)
א
A
א
K
E
F
אא،
א
F
א
E
א،
א
C
אא
א
D
אא
A
א
אא
K
٣
J
٨١
٣
J
٧
אאא
Losses and Efficiency
אאאא
א
אאא
W
J
אא
Mechanical loss
J
אא
Copper loss
J
אא
Iron loss
אאא
،אא
אא
K
אא
F
אא
KE
٣
J
٧
J
١
אא
א א א
א
אא
א
א
Input power
٣
J
٩١
אאא
א
(W).
אאא
א
P
g
،
P
g
א
W
P
g
=E
a
I
a
P
g
=P
in
-P
cu
٣-٤٣
אא
א
Pg
א
Pmech
Pin
אאאא
א
Pout
K
٣
J
٠٢
אאאא
K
•
א
W
،אאאאאא
א
W
J
אא
٤٤ ٣
in
in
I
V
HP
p
i
p
o
746
*
/
/
=
=
η
אאא
٥٤ ٣
losses
P
P
out
out
+
=
η
٦٤ ٣
in
in
P
losses
P
−
=
η
א
P
in
P
g
P
out
HP
א
א
א
P
i
&P
mech
א
P
cu
٣
J
٩١
אאאאא
i/p
o/p
HP
P
mech
+P
i
I
2
a
R
a
I
2
sh
R
sh
I
2
se
R
se
∆VI
I
a
E
a
אא
אאאא
אאא
٣
J
٠٢
אאאא
٣
J
٥
אא
٠٥١
אא
٠٦٩
L
،
٠٥٥
K
א
١٩
٪
אא
٥٧٢
א
١,
K
K
א
W
J
אאא
אאאאא
J
אאא
٠٦
٪
אאא
٢,
K
אאא
K
א
HP= ٠٥١n=٩٦٠rpm V
in
=٠٥٥V η=٩١٪ R
sh
=٥٧٢Ω R
a
=١٫٠Ω
in
out
P
P
=
η
in
P
746
*
150
91
.
0
=
W
P
in
122967
91
.
0
746
*
150
=
=
in
in
in
I
V
P
=
in
I
*
550
122967
=
A
I
in
6
.
223
550
/
122967
=
=
A
R
V
R
V
I
sh
in
sh
sh
sh
2
275
550 =
=
=
=
A
I
I
I
sh
in
a
6
.
221
2
6
.
223
=
−
=
−
=
W
R
I
R
I
P
sh
sh
a
a
cu
6011
275
*
)
2
(
1
.
0
*
)
6
.
221
(
2
2
2
2
=
+
=
+
=
W
P
P
P
out
in
losses
11067
746
*
150
122967
=
−
=
−
=
cu
i
mech
losses
P
P
P
P
+
+
=
-
W
P
P
P
P
cu
losses
i
mech
5056
6011
11067
=
−
=
−
=
+
V
R
I
V
E
a
a
in
b
84
.
527
1
.
0
*
6
.
221
550
=
−
=
−
=
-
m
N
n
I
E
I
E
T
a
b
a
b
.
5
.
1163
960
*
*
2
60
*
6
.
221
*
84
.
527
60
2
=
=
=
=
π
π
ω
a
I
T
Φ
α
،א
Φ
a
I
T
α
6
.
0
1
1
=
=
a
a
I
I
T
T
A
I
I
a
a
96
.
132
6
.
221
*
6
.
0
*
6
.
0
1
=
=
=
V
R
R
I
V
E
ad
a
a
in
b
1
.
510
)
2
.
0
1
.
0
(
*
96
.
132
550
)
(
1
1
=
+
−
=
+
−
=
1
*
*
2
60
*
96
.
132
*
1
.
510
5
.
1163
*
6
.
0
n
π
=
-
rpm
n
928
5
.
1163
*
6
.
0
*
*
2
60
*
96
.
132
*
1
.
510
1
=
=
π
60
2
1
1
1
1
1
1
1
n
I
E
I
E
T
a
b
a
b
π
ω
=
=

١
J
אאא
K
٢
J
אא؟אאא
K
٣
J
אאאאאאא
K
٤
J
אא
אא
K
٥
J
אא
؟
K
٦
J
א אא ،א א א
אא
K
٧
J
אא
؟אא
٨
J
אא،אא
א
؟א
٩
J
א
אאאא
K
؟א
٠١
J
א
٤
J
٠٢٢
א
٠٤٥
،א
א
٢٣
٦
K
אא،א
١
א
٩,
אא
٣٠
{٠
–
א
–
אא
K
١١
J
א
٠٢٢
٠٠٥
L
א
٠٥
K
א
א
אאאאא
א،א
٢,
K
٢١
J
א
٠٥٢
J
٤
א
٤٨٧
K
אאאא
٥,
،
٥٢
,
א
א
٥٢
אאא،
א
٠٤
א
K
٣١
J
א
٠٤٢
٠٥٨
L
א
٠٠١
א،
אאא
٥١
,
،
١,
א،
א

אא
٠٣
אאא،
א
א
K
٤١
J
א
٠٠٥
אאא
٥٥
١٢
אא،
٨,
K
א
٥٤٢
K
א
אאאאאא
K
٥١
J
א
٤
א
٠٢٨
א
א
٢
א،
٠٠٢١
L
אא
٦
،
אאא
٠٢١
K
א
אאאאאא
٥١
,
،
٥٠
{٠
،
٠٢١
،
W
J
אאא
–
אא
א
K